スパイス 組み込み制御装置の受注製作
自社標準仕様の製作
平成27年10月 8日
汎用の高速シリアル通信機能(7) 実験基板の仕様検討
新規製作する実験基板の仕様を考えます。今後実験したい機能までを考えると以下のようになります。
・RS-485プログラムのデバッグには少なくとも3CH以上のRS-485を実装したい
今回の当面の目標です。
・CAN通信を実験出来るようにCANを2CH以上実装したい。
すぐには出来ないでしょうが、いずれCAN通信を実験するとき用に2CH以上を確保します。
・プログラムを複数のCPUで機能分割することを前提にSPI通信で複数CPUの通信機能を実装したい
プログラムの機械制御部(客先仕様に依存する)とRTC・SDカードIFといった管理機能(標準化しやすい)部分を別のCPUに分けて実装することで、プログラムの開発負担を減らせるようにしたい。
・SDカードでPCとデータをやり取りできるようにファイルシステムを実装したい
ファイルシステムを実装することで、装置の稼動記録を簡単に取り出せるようにしたい。
・RTCのプログラムを固定化したい
時計機能を標準化したい。ファイルシステムを実装するなら同時に実装したい
・SDカードを実装できない程度の小規模システム向けにシリアルROMへの書き込みプログラムをPIC32に移植したい
プログラム自体はPIC24で書いてあるので、移植して動作検証を終わらせたい
この仕様はある意味で、中規模のメイン基板の仕様になります。機能ブロック図を示します。
本来は機械図面にすべきですが、時間がかかるので手書きのままになっています。
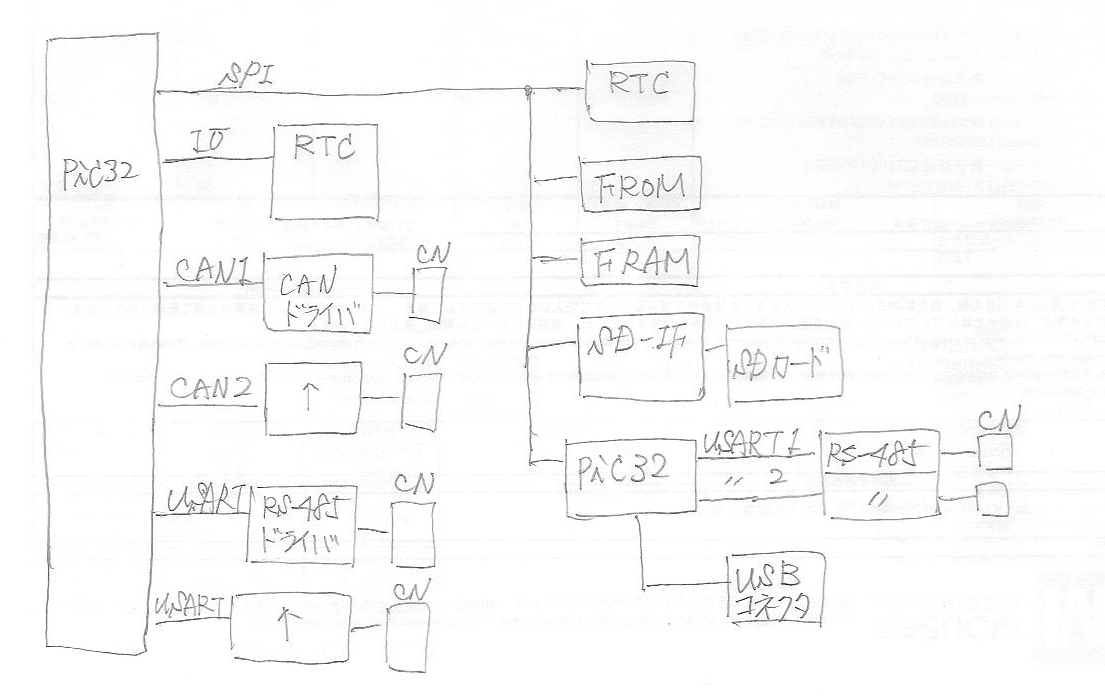
RS-485を合計で4CH、CANを2CH実装します。
それ以外にはRTCとしてIO接続型のRTC-4543SAとSPI接続型のDS-3234Sの二つを接続しておきます。製品の規模によってどちらかを使い分けることになります。
SPI接続には他にFRAMとFROMを接続しておきます。外部のIFは同じですが、動作時とくに書き込みの速度が大きく異なります。これらは装置の稼動記録を保存するのが主な用途になります。書き込みに時間のかかるFROMよりも将来的にはFRAMを使用したいので早めに動作の検証を出来るようにしておきます。
次はPIC32です。RS-485の通信テストではスレーブCPUとして動作します。また、プログラムの機能分割を実験するためにメインのPIC32とはSPIで接続してあります。
このCPUにはUSBコネクタも実装しますが、主な用途は実験中の簡易電源です。完全な通信をしようとすると高速な信号を扱うため基板上でも特性インピーダンスを管理する必要が出てきますが、今回はそこまでの配慮は行いません。出来るだけ動作しやすいよう配線長が最短になるよう基板上の配置では配慮をします。
最後はSDカードIFです。基本的にMMCカード仕様のSPI動作を行います。
この程度の回路でも検討すべき項目は多岐に渡ります。次回以降順番に内容を記録していきます。